I dug out a prototype Hyperon (test wheel) from my personal collection.

I fitted it with a Challenge white Criterium tire.

The hub is a Neutron.
As for the spokes:

The freewheel side is about CX-RAY thickness,
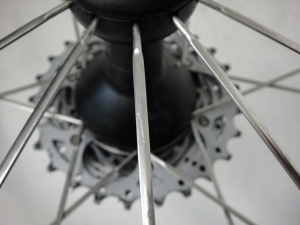
and the drive side is about CX thickness.
In the asymmetric spoke builds I normally do—like the "semi-competition" setup—I select spokes so that the freewheel side is thicker, has a larger cross-section, and is heavier. Same with Campagnolo, Shimano, and Reynolds asymmetric builds: they also make the freewheel side thicker.
This is the opposite, so the drive side is really floppy. It's probably rideable, but attacking on descents might cause it to deflect, and if I really cranked hard with sideways force it would definitely flex.
I judged there was still room to tension the freewheel side further, so I tightened it as hard as I could. Increasing tension only on the freewheel side naturally pulls the rim toward that side. I can then tension the drive side more to bring it back to center, but the amount of rim movement per nipple turn differs between freewheel and drive sides. The drive side moves more for the same screw rotation, so I can't increase its tension as much as I rotated the freewheel side.
The drive side is tighter than before retensioning, but it's far from my usual hand-built drive side (tangent lacing), and nowhere near production Hyperons. Wheels really are all about engineering.
With decent high-flange, offset-rim hubs, drive-side radial lacing can be barely acceptable even with equal spoke counts both sides—or so I thought. But this reverse asymmetric setup destroys that, revealing a massive downside.
This is a demonstration wheel meant to show people: "Once we confirm center alignment and sufficient freewheel-side tension with almost no room for further tensioning," I'd explain, "look how sloppy the drive side gets with radial lacing and reverse asymmetric spoking." But even after using up nearly all the freewheel-side tensioning margin, the drive side is still too loose.

I fitted it with a Challenge white Criterium tire.

The hub is a Neutron.
As for the spokes:

The freewheel side is about CX-RAY thickness,
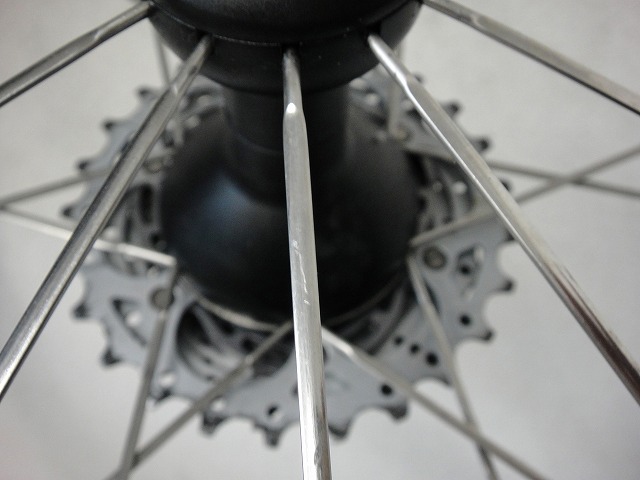
and the drive side is about CX thickness.
In the asymmetric spoke builds I normally do—like the "semi-competition" setup—I select spokes so that the freewheel side is thicker, has a larger cross-section, and is heavier. Same with Campagnolo, Shimano, and Reynolds asymmetric builds: they also make the freewheel side thicker.
This is the opposite, so the drive side is really floppy. It's probably rideable, but attacking on descents might cause it to deflect, and if I really cranked hard with sideways force it would definitely flex.
I judged there was still room to tension the freewheel side further, so I tightened it as hard as I could. Increasing tension only on the freewheel side naturally pulls the rim toward that side. I can then tension the drive side more to bring it back to center, but the amount of rim movement per nipple turn differs between freewheel and drive sides. The drive side moves more for the same screw rotation, so I can't increase its tension as much as I rotated the freewheel side.
The drive side is tighter than before retensioning, but it's far from my usual hand-built drive side (tangent lacing), and nowhere near production Hyperons. Wheels really are all about engineering.
With decent high-flange, offset-rim hubs, drive-side radial lacing can be barely acceptable even with equal spoke counts both sides—or so I thought. But this reverse asymmetric setup destroys that, revealing a massive downside.
This is a demonstration wheel meant to show people: "Once we confirm center alignment and sufficient freewheel-side tension with almost no room for further tensioning," I'd explain, "look how sloppy the drive side gets with radial lacing and reverse asymmetric spoking." But even after using up nearly all the freewheel-side tensioning margin, the drive side is still too loose.